2010年代以降
2010年代以降のロボット

ロボット本体

操作盤
原子力発電所において人が長時間立ち入れないような場所で、遠隔操作による作業を目的とした小型双腕重機型ロボット
《特徴》| 項目 | 仕様 |
|---|---|
| 装置名 | 小型双腕重機型ロボット |
| 質量 | 約2.5トン |
| 外形寸法 | 幅:980~1,280mm(クローラ可変) 長さ:1,570mm 高さ:1,500mm(アーム込み最低) |
| 駆動方式 | ディーゼルエンジン 定格出力 11kw/min-1(15ps/2,400rpm) |
| 燃料 | 軽油 |
| 台車型式 | クローラ式 |
| 駆動時間 | 約15時間(連続使用の場合) |
| 吊上げ荷重 | 両腕300kg/片腕150kg |
| 操作方法 | 無線 |

調査用小型ロボット本体

操作コンソール

空間台帳
災害現場などすぐに人が立ち入ることの出来ない環境下において、現場の状況を把握し、その後の復旧や救助を迅速に進めるためのシステム
《特徴》| 項目 | 仕様 |
|---|---|
| 装置名 | 調査用 小型ロボット |
| 質量 | 約45kg |
| 外形寸法 | 幅509mm× 長さ755mm× 高さ815mm |
| 台車型式 | クローラ式 |
| 駆動時間 | 約3~4時間 (連続使用の場合) |
| 積載荷重 | 20kg以下 |
| 操作方法 | 無線 |
| 項目 | 仕様 |
|---|---|
| 装置名 | マルチ機能搭載 ロボット |
| 質量 | 約100kg |
| 外形寸法 | 幅611mm× 長さ876mm× 高さ815mm |
| 台車型式 | クローラ式 |
| 駆動時間 | 約3~4時間 (連続使用の場合) |
| 積載荷重 | 200kg以下 |
| 操作方法 | 無線 |
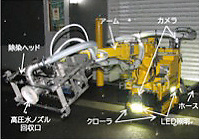
遠隔除染装置本体
原子力発電所において人が長時間立ち入れないような場所で、遠隔操作による放射線汚染環境改善を目的とした高圧水を用いる遠隔除染装置
《特徴》| 項目 | 仕様 | |
|---|---|---|
| 除染装置 本体 | アーム型式 | 油圧シリンダ駆動リンク型 |
| 台車型式 | クローラ式 | |
| 質量 | 台車:約800kg、アーム:約40kg | |
| 外形寸法 | 幅600mm×長さ1,529mm×高さ1,255mm | |
| 操作方式 | 有線 | |
| 回収装置 | タンク容量 | 1000リットル |
| ケーブル・ ホース | 長さ | ケーブル:100m、ホース:75m |
