1980年代
1980年代のロボット

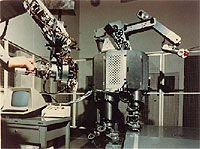
視覚を用いて部品の位置、姿勢を認識し、2台のロボットの協調した動作で組立を行う。 1980年日立技術展に出展し、NHK特集「ロボットの時代」にも紹介された。

従来の標準型塗装ロボットに、コンパクトで動作範囲の大きなフレキシブル手首を採用し、一段と狭い部位の塗装が可能になった。 制御装置も16bitマイコンを使用し、容積比で従来の1/2に小型化し、CRT画面装備により一層の操作性が向上した。
伸縮機能を備えた5足の移動機構に6自由度のマスタ・スレーブタイプのマニピュレータを搭載した自走式のマニピュレータ。 この5足の伸縮機能により、段差、スロープ及び階段の昇降を可能としており、作業が必要な場所に、遠隔でスレーブマニピュレータを運んで作業を実現できる。

原子力プラント点検用の漏洩型無線通信式遠隔操縦型ロボット。階段走行可能な4基クローラに6自由度ワイヤドライブのマスタスレーブ型マニピュレータを搭載。

特殊ギア連結メカニズムで象の鼻のようにフレキシブルな曲げ動作が可能な手首機構を備えた塗装ロボット。

シーケンサ、ロボット、視覚装置のプログラムを共通の言語で記述できる世界初のFA制御用統一言語を開発。

組立ロボット「A6030」のプロトタイプで、世界初のセンサ制御可能な標準ロボット言語「ARL」を搭載している。 この機種をベースにして小型組立ロボット「A3020」「A6030」「A4010S」等が製品化された。

クローラ型の自律型知能移動ロボットとして、1984年(昭和59年)日立技術展に出展した。
《特 徴》
(1)形状可変形クローラ機構及び走行環境センシングによる階段、段差の自律踏破
(2)パターンマッチング方式画像認識により走行路面を識別し建屋内を自律走行
(3)力制御機能を持つ6軸マニピュレータによりドア開閉等の自律作業実施
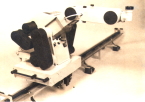
大型構造物の溶接作業が可能な人手で持ち運べる小型溶接ロボット。アーム部約29kg。作業対象に応じて、レール上を直線移動したり、旋回ベースにアタッチして溶接作業が可能。
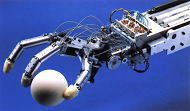
形状記憶合金(SMA)をアクチュエータとする3指12自由度、手首2自由度を備えた人の手と同サイズのロボットハンド。 柔軟なアクチュエータ特性により3本指によるボールの操り等の器用な動作が可能。国際ロボット展ROBOT8 (デトロイト開催)に出展。

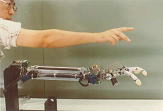
人間の腕の動きに似たロボットの動作により、カセットテープの出し入れやスイッチの操作を行い、自動化の遅れていた調整・検査工程へのロボット応用に先鞭をつけた。

力センサを搭載したロボットに仮想コンプライアンス制御方式を適用し、ロボットの柔らかい動作(外力に応じた並進、回転運動)を実現した。
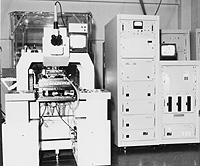
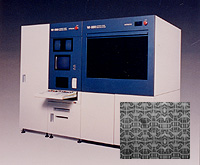
視覚技術の工業応用として、世界に先駆けて完成したIC、LSI用のウェハ外観検査装置。IC、LSIなどの設計パターンから実時間で画像を展開しつつ、実画像と比較する設計パターン参照方式を採用。この方式はその後、世界の標準方式となった。当初は社内応用に限って装置を製造していたが、後に一般にも市販。当時のメモリーなど、最先端半導体のウェハ検査に実用され、日本の半導体の信頼性への評価を一挙に高めた。
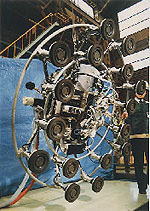

球形ガスホルダ溶接部の遠隔検査を目的に開発された国内初の壁面移動ロボット。このロボットは、円形の内外フレームの組み合わせから成り、片フレーム8個、合計16個の真空吸盤を備えている。ロボットの移動は走行、旋回により行い、内側に搭載した超音波プローブのX軸、Y軸の走査により、超音波探傷試験を実施できる。

関節を板バネで構成し、形状記憶合金(SMA)ワイヤで半導体ウエハを柔軟に把持できるクリーン度クラス10対応の無摺動グリッパ。
各関節にモータを分散配置したモジュール型で、関節ユニットからの発塵を防ぐラビリンスシールを設けた半導体ウェハハンドリング用ロボット。手先には無摺動グリッパを供え、クラス10のクリーン作業が可能。

ゴム人工筋肉((株)ブリヂストン製)をアクチュエータとした複腕ロボット。空圧駆動の柔軟かつ軽量のアームを実現。筑波万国博EXPO'85にて展示。

昭和58年(1983年)より、開発に着手。昭和60年(1985年)に、世界最大の家電専門国際見本市であるドイツ「ドモテクニカ
Domotechnica)」に試作機を出品。
《特 徴》
(1)超音波レーダーとジャイロを用いた位置検出機構
(2)障害物地図と走行地図を作成し、部屋内をくまなく清掃

早稲田大学との共同開発による二足歩行ロボット。
WHLはWaseda-Hitachi-Legを意味する。2足歩行ロボット開発へのメーカー参入第一号。
筑波万国博EXPO'85での政府館に展示した。
《特 徴》
(1)動力源(電源)以外の全ての機能をロボット本体に搭載した、自立形2足歩行ロボット
(2)全高:1.4m、脚長:0.9m、質量:120kg
(3)油圧駆動:全12自由度(各脚6自由度)
(4)準動歩行(1歩約10秒)で安定に移動。
万博期間中60km
以上を無事故で踏破。
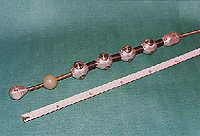
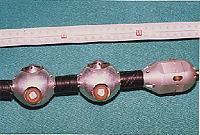
複数の球体をフレキシブルカプリングで連結することで、屈曲部のある配管内を移動して検査することが可能な配管内検査用ロボット。 球体は、駆動用、誘導用、センサ用等の各種機能を持つものを複数準備し、用途に応じて任意に編成して、各種検査作業に対応可能。

マスタアーム先端の座標を求め、これにスレーブアーム先端の座標が対応するようにスレーブの各関節を制御する宇宙用マニピュレータを開発。

駆動機構にACサーボモータ及び絶対番地式位置検出器を搭載して保守性、信頼性の向上とスリムで作業領域の広いインライン手首を採用した産業用ロボット。

姿勢が不安定な部品を視覚認識してロボットで掴み、もう1台のロボットに掴まれた他の部品と同時に組付けを行い、姿勢を固定する双腕組立ロボットを開発した。
部分画像の抽出パターン組合わせによる部品姿勢の認識と、動作中の交信及び最適経路選択による複数ロボットの高速な同期動作を実現し、手組み作業の自動化を可能にした。
本装置は、VTRメカニズムの高速全自動組立てラインに適用された。

人間の思考プロセスを模擬した作業モデルと直感的ユーザーインターフェースにより、イメージ通りにロボットを操作できる教示システムを開発。「ボルトを掴み、テーブルの上に置く」のような概略指示だけで、作業モデルに基づき座標データや、画像認識プログラムまでを一貫生成するもので、ロボット操作におけるプログラムレス化を可能とした。本技術は、1991年日立技術展にて次世代生産システムとして紹介。
