「未来の物流倉庫はどうあるべきか」―このような問いから物流コックピットは生まれました。
物流コックピットでは、人工知能(AI)の計算したデータ分析結果と倉庫内のカメラ映像を重ね、わかりやすく表示することで、現場のプロフェッショナルの意思決定を支援します。
インパクトや楽しさにもこだわったという開発時のエピソードを伺いました。

宇都木 契(うつぎ けい)
主任研究員
(2016年11月1日 公開)
宇都木店舗運営の高度化やインターネット通販などのサービスの充実に伴い、物流倉庫で保管するものの個別化と多様化が進んでいます。多種多様な物品は消費者の需要に応じて保管量が激しく変化するので、倉庫の運用にフレキシビリティが求められています。その一方で宅配便の即日配達サービスなどで提供のスピードも要求されます。物流倉庫にはこれまで以上にフレキシビリティとスピードの両立が求められているのです。
このような物流倉庫での問題を解決するために、2013年に、研究所内からAIやロボットなどさまざまな分野のスペシャリストを集めてチームが作られました。最初は物流の現場に入り込んで観察するところから始め、2014年からは、目先の課題をただ解決するだけではなく、もっととんがった、思い切ったことを検討してみようという話になりました。「未来の物流倉庫はどうあるべきか」という問いから、我々がめざすべき方向を考え直してみたんです。そうして生まれたのが「フレキシビリティをAIで、スピードをロボット技術で補うことで両立させる」という未来の理想の倉庫のコンセプトでした。
宇都木そうですね。AIはさまざまな分野で活用が期待されています。ただ、AIで分析された結果の根拠が見えにくいこともあって、人によっては不信をもたれてもいるようです。いままでのコンピューターのプログラムはアルゴリズムを人が書いているので、中身がわかっていました。それがAIで機械学習となると、分析結果を出すまでの過程がブラックボックス化します。それでも分析結果を信じないといけないのかという話になりますよね。

今回開発した物流コックピットでは、AIによって分析された結果を見て、現場監督が対策を立てることを想定しています。AIによる分析結果の根拠が見えないとなると現場監督が意思決定に責任を持てません。「AIが出した結果だからYes」とはならないんですね。そうなると、AIが出した分析結果の根拠の見せ方や人とAIをつなぐインターフェースはかなり重要になってきます。
わたし自身はこれまで、立体表示やディスプレイに関する研究をしてきました。今回はその立場から、AIを人が受け入れるためのインターフェースを検討することになりました。分析結果を現場監督が責任を持って判断するためには、AIによって分析される物流の重要指標(KPI:Key Performance Indicator)とその分析の根拠を、人にわかりやすく表示することが重要です。そのうえで、人とAIをフレンドリーにつなぐインターフェースとして今回の物流コックピットを開発しました。
宇都木物流コックピットは、現場監督が倉庫で起きていることを把握する場であると同時に、AIによって導き出されたデータについて、問題の把握、対策といったことを関係者間で話し合って合意形成するための場でもあります。何人かで見ることを想定してある程度の大きさが必要だろうと考えてはいたのですが、チームの人がスケッチを描いたり、紙で模型を作ったりして、画面を大きくし、少し角度を開き気味に…と試行錯誤しているうちに、予想以上に大きなディスプレイになりました。見た目が斬新でインパクトがあることにもこだわっています。コックピットという言葉が示す、近未来的でものものしい雰囲気を出せたと思います。
写真1 物流コックピットのイメージ

宇都木画面には、倉庫内のカメラ映像と、AIによって分析されたKPIの変動状況を色で表したものが重ねて表示されます。問題だと判定されたKPIと、問題ないと判定されたKPIは色別に表示されます。インターフェースの一部はタッチパネルになっていて、現場監督がKPIの色で目視して問題を感じた場合には、その映像を拡大したり視点の向きを変えたりと自由に詳細情報を見ることができます。これによって現場を足で回ったときと同じように対策を立てられるんです。アラートと言って、「ここがおかしいんじゃないですか?」とレポートしてくることもありますし、逆に現場の人がカメラの映像の中から気になる部分をAIで分析させてデータを集計して出すということもできます。AIから人、人からAIというインタラクティブな部分をカバーできればと考えています。
実は、当初コックピットにカメラ映像を表示することは考えていなかったんです。ですが、実際に現場を観察してみると、現場の人にはAIには見えないものが見えていて、それが問題解決に必要なことがわかってきました。現場の監督って本当にプロフェッショナルなんですよ。みなさん、「倉庫の中を歩き回って自分の目で見て回れ」と口を酸っぱくしておっしゃいます。サイバーフィジカルと言いますが、実際の現場の風景はたくさんの情報を含んでいます。情報が多すぎて、現場を知らない人には何が重要なのかわからない。そんな多くの情報の中から問題の原因となるような重要なことが、現場の監督の目には見えるんです。

宇都木そうなんです。現場監督がカメラ映像を見たうえでAIによって計算された数字を見ると、倉庫の状況と数字が結び付けられます。それで初めて倉庫で起きている問題に対して対策できるようになるんですね。
何か問題が起きているときに、現場監督だったらすぐに原因がわかって解決できることがあるんです。ただし、その勘を働かせるには実際に現場を見るというアクションが不可欠です。現場監督と同じレベルで、倉庫で何が起きているか判断することはAIにはまだまだ難しい。そこで、実際に現場監督が見て回る代わりとしてもカメラ映像を使うことにしました。
宇都木カメラ映像をそのまま見ているわけではありません。従来の監視カメラ映像で見ると、視点が固定されて死角ができてしまいます。そこで、死角がないように複数の全方位カメラの映像を組み合わせて倉庫内を自由な視点でモニタリングできるようにしました。
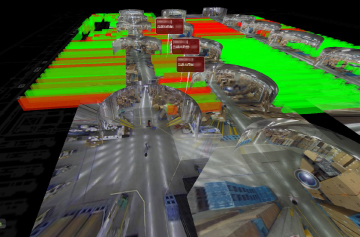
まずは、倉庫内の天井に設置した全方位カメラで映像を撮ります。その映像を元に、3次元マップを作ります。これで上方からの俯瞰の視点で倉庫内を見ることができます。その3次元マップの中に多数の視点位置からの映像情報から合成したパノラマのような画像を表示します。これでカメラの死角がなくなります。このような表示方法を我々は2.5次元俯瞰表示技術と呼んでいます。
宇都木2次元に映像情報を追加することで3次元的な意味合いも出した、という意味で2.5次元と呼んでいます。たいてい俯瞰マップってイラスト(2次元)で描いた方がわかりやすいんですよ。とは言えイラストだと実際の現場の情報が抜けてしまうので、映像情報を足しています。人が見てわかりやすい絵であれば完全に3次元を再現する必要はないし、完全に3次元を再現するよりもむしろ人間に見やすいことがあるんです。
写真2 2.5次元俯瞰表示技術のイメージ
例えば、アニメで遠近感をものすごく誇張していることがありますよね。野球アニメでボールを投げているときに突然ボールがふくらんで…どんなカメラで撮ったらこんな絵になるんだろうというような(笑)。このような表現は3次元としては破綻していますが、人が見たときには、3次元よりも臨場感が伝わるんですね。人とAIをフレンドリーにつなぐためにも、単に2次元より情報が多いだけではなく、うまいイラストレーターが描くようなわかりやすさを実現するデザインをめざしています。

宇都木研究にご協力いただいた日立物流のみなさんには、近未来的なインパクトのあるディスプレイは、こちらの期待以上に好評でした。画面に表示するものとして映像を追加したことで、日々変化していく倉庫のライフログとしての利用や、海外の倉庫での遠隔指示に使えないかというようなアイデアも出ました。
今後は、インターフェースの後ろでAIに分析させる対象をどうしていくか、AIのサジェスチョンがどのような価値を生んでいくかという点が、重要になってくると考えています。AIのサジェスチョンをどんな分野が求めているのか調査しながら、分析対象を物流の外へも広げようとしているところです。
宇都木これまで、数学的な計算上は正しいはずの見せ方と、人が見たときにわかりやすい、またはインパクトがある見せ方は違うのではないかという観点で研究してきました。これからも、人が見たときにインパクトや楽しさを感じる見せ方とは何かを、科学や数学でサイエンスとして再現するような研究をしていきたいと思っています。
個人的には、自身の研究にSF的な発想を取り入れ続けていきたいと思っています。ここ10年くらいでコンシューマ市場に降りてきた技術が多くあります。いまはそういった技術を取り入れて、昔映画や小説で描いていた未来の世界にデザインして組み合わせるという競争が進んでいるんです。そういう競争に遅れないように、今後は自身のイマジネーションをいかに先行させるかも大事にしていきたいですね。


