2014年3月10日 (株)日立製作所、日立GEニュークリア・エナジー(株)
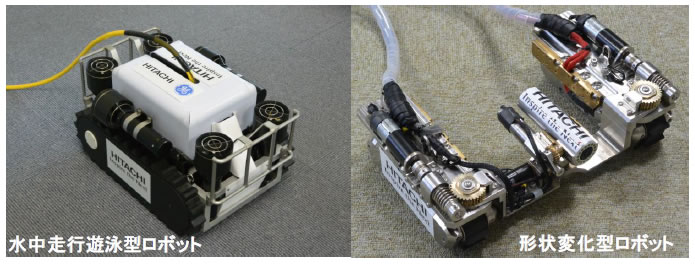
福島第一原子力発電所での燃料取り出しに向けた調査用の水中走行遊泳型ロボット・形状変化型ロボットを開発
株式会社日立製作所と日立GEニュークリア・エナジー株式会社は、姿勢や形状を自在に変化させ、狭隘空間であっても障害物を回避しながら、広い範囲を遠隔で調査できる水中走行遊泳型ロボット(クローラ)と形状変化型ロボット(クローラ)を開発しました。この二つのロボットは、資源エネルギー庁が補助事業として進めている福島第一原子力発電所での燃料取り出し作業に用いるための遠隔装置の開発に先立ち、日立と日立GEが各種調査に用いるために開発したものです。水中走行遊泳型ロボットは水中、形状変化型ロボットは陸上において、人間が作業することができない障害物や構造物に囲まれた狭い空間での移動が可能であり、冷却水の漏えい箇所の調査や燃料状態の調査に活用することができます。
この二つのロボットの詳細は、3月26日から28日まで、東京都市大学で開催される「日本原子力学会2014年春の年会」にて発表する予定です。
このニュースは、以下の新聞、Webサイトなどに掲載されました。
