2015年10月14日 株式会社日立製作所、日立オートモティブシステムズ株式会社、クラリオン株式会社
一般道での自動運転実用化に向け、歩行者の行動変化を予測し衝突を防止する基本技術を開発
株式会社日立製作所、日立オートモティブシステムズ株式会社、クラリオン株式会社は、歩行者などの行動変化を予測し、リアルタイムで最適な速度パターンを高速演算することで、安全かつ実用的な速度で衝突を防止する基本技術を開発しました。その特長は、1.行動変化予測に基づく速度制御技術、2.高速演算技術です。
今回開発した技術の有効性を確認するため、実験車による検証を行い、実用的な歩行者通過速度、および良好な乗り心地の基準である加速度(2.2 m/s2以下)、加速度変化(2.0 m/s3以下)を達成しました。
今後は米国ミシガン大学が2015年7月に開設した自動運転車やコネクテッドカーの走行実験プロジェクト「Mcity(エムシティ)」などの走行環境を活用し、実験車による評価検証を重ねていく予定です。
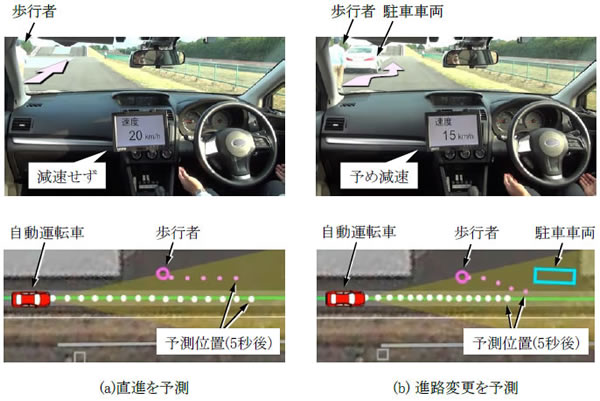
歩行者行動予測に基づく速度制御
(上図:実験車、下図:予測制御情報)
このニュースは、以下の新聞、Webサイトなどに掲載されました。
