2015年8月25日
物流倉庫での集品作業の自動化に向けた自律移動型双腕ロボットの制御技術を開発
株式会社日立製作所は、このたび、株式会社日立物流の協力のもと、物流倉庫での集品作業の自動化に向けて、目的の商品が保管されている棚まで移動して商品を取り出し、箱詰めまで行う自律移動型双腕ロボットの制御技術を開発しました。本制御技術により、移動しながら目的の商品を見つけてアームを伸ばす動作や、1本のアームでは取り出せない商品を2本のアームで取り出す動作など、人と同様の集品作業が可能となります。本制御技術を搭載したロボットにより、人手を前提とした多品種少量の商品を扱う倉庫において、集品作業を効率的かつ安定的に実施することが期待されます。
今回の開発は、日立物流と共同で取り組む未来型倉庫の研究開発の一部として行われました。日立は、本技術を搭載したロボットの実用化を含め、物流事業の革新に貢献していきます。
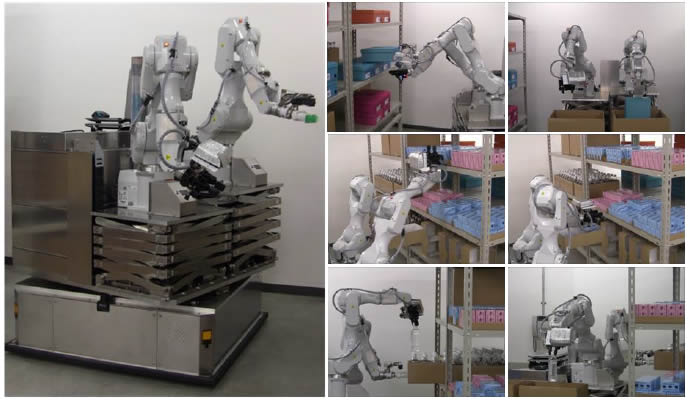
制御技術の開発のために製作した自律移動型双腕ロボット
