2014年3月7日
危険を予知して回避する人間共生ロボット「EMIEW2」の自律移動技術を開発
株式会社日立製作所は、人間共生ロボット「EMIEW2」の移動技術を進化させ、死角から人などが飛び出す可能性の高さ(危険ポテンシャル)を推定し、その高さに応じた回避行動をとる移動技術を新たに開発しました。本技術は、死角が多い環境での安全かつスムーズな自律移動を可能とし、ロボットの自律移動技術を大きく改善するものです。
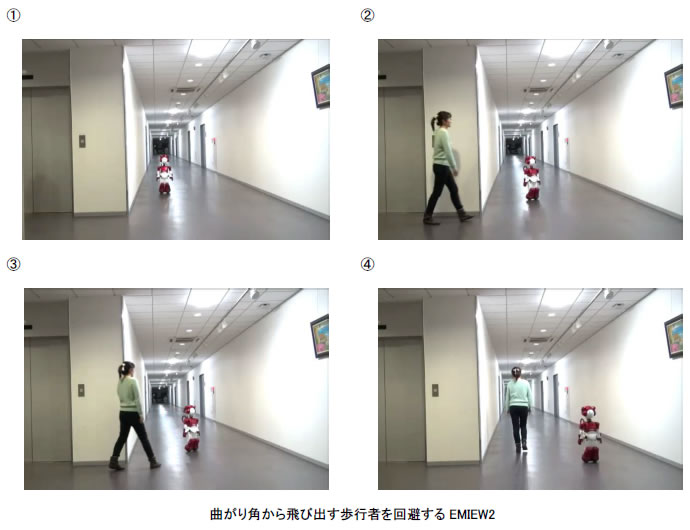
今回「EMIEW2」に搭載した機能を確認するため、一般的な屋内通路を模擬した幅1.2mの通路内で走行実験を行い、危険ポテンシャルの高い死角の回避および回避不可能なときの減速動作を確認しました。その一例を図に示します。①「EMIEW2」が曲がり角のある通路に差しかかります。②センサではまだ人は検出されていませんが、危険ポテンシャルの高さにより、曲がり角から少し離れた方向に進路を変更します。③曲がり角から人が出てきます。④人との安全な距離を確保しながらすれ違うよう、行動します。
日立では、今後も自律移動技術をはじめ、人と共存し、人をサポートするサービスロボットの実用性向上をめざして開発を推進します。
このニュースは、以下の新聞、Webサイトなどに掲載されました。
